HTV(こうのとり)のISSへのランデブ・ドッキング [HTV]

引用:JAXA
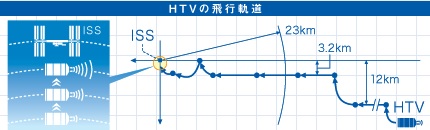
HTVは、いきなりISSと同じ軌道に入り追いかけるわけではなく
一旦ISSよりも内側の軌道に投入され、徐々に高度を上げながらISSに接近するそうです。
引用:三菱電機
[ランデブ・ドッキング]
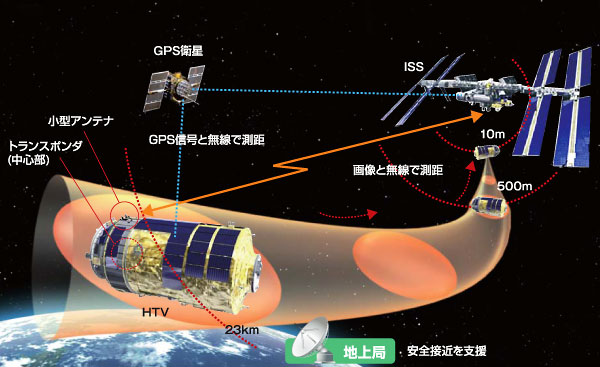
H-IIBから分離されたHTVはGPSで位置を確認。
異常点検や通信の確保を行い、ISSへの接近を始めます。
引用:三菱電機
お互いの距離が23kmまで近づくと、HTV・ISS双方に搭載されている
近傍通信システム(PROX)を使って直接通信を始めます。
PROXは、姿勢制御や動作状態のデータのやり取りができ、
HTVをISSまで安全に誘導、ドッキングを支援するシステム。
三菱電機が開発したもので、アメリカのシグナス宇宙船にも採用されており、
1ユニット7億円ほどで輸出されています。
ISSの下方500mまで回り込むと、そこからはレーダーも使用。
300m・30mの位置では一旦停止して、地上から許可を得てさらに接近。
最終的に10mの距離で、HTVとISSは相対的に停止(秒速約7.7kmで併走状態)。
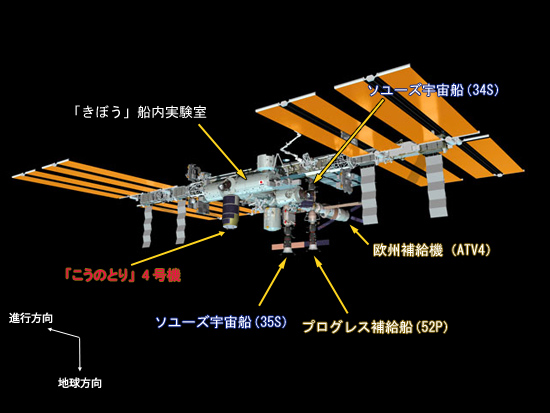
宇宙飛行士が操作するISSのロボットアームがHTVをつかみ、
ISSのハーモニーと呼ばれるモジュールまで誘導。
共通結合機構(CBM)をつかって、HTVとISSはドッキングします。
[安全性]
ISSには宇宙飛行士が滞在しており、HTVの誤作動、故障によるISSへの衝突は許されません。
そのためHTVは構成部品自体の信頼性はもちろん、
さらにシステムに2重、3重の安全策がとられているそうです。
たとえば電力は2系統から供給されていて、一方が故障しても、
残った一方に切り替えられ、すべての供給をまかなえます。
またCPUもひとつが故障しても、他のCPUにタスクが振り分けられ作業を続行できます。
2013-08-07 20:44
nice!(0)
コメント(0)
トラックバック(0)




コメント 0