HTV(こうのとり)のISSへのランデブ・ドッキング [HTV]

引用:JAXA
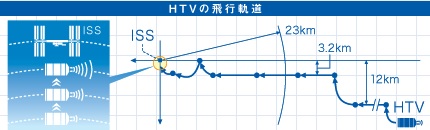
HTVは、いきなりISSと同じ軌道に入り追いかけるわけではなく
一旦ISSよりも内側の軌道に投入され、徐々に高度を上げながらISSに接近するそうです。
引用:三菱電機
[ランデブ・ドッキング]
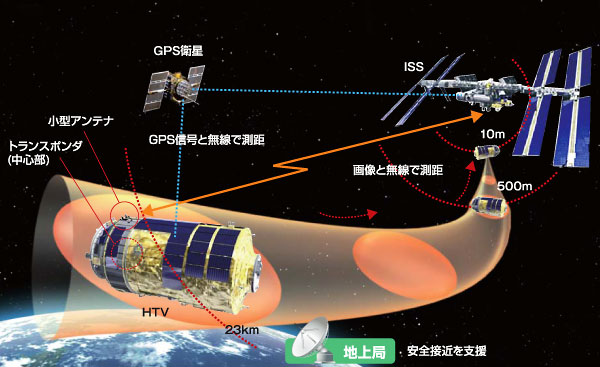
H-IIBから分離されたHTVはGPSで位置を確認。
異常点検や通信の確保を行い、ISSへの接近を始めます。
引用:三菱電機
お互いの距離が23kmまで近づくと、HTV・ISS双方に搭載されている
近傍通信システム(PROX)を使って直接通信を始めます。
PROXは、姿勢制御や動作状態のデータのやり取りができ、
HTVをISSまで安全に誘導、ドッキングを支援するシステム。
三菱電機が開発したもので、アメリカのシグナス宇宙船にも採用されており、
1ユニット7億円ほどで輸出されています。
ISSの下方500mまで回り込むと、そこからはレーダーも使用。
300m・30mの位置では一旦停止して、地上から許可を得てさらに接近。
最終的に10mの距離で、HTVとISSは相対的に停止(秒速約7.7kmで併走状態)。
宇宙飛行士が操作するISSのロボットアームがHTVをつかみ、
ISSのハーモニーと呼ばれるモジュールまで誘導。
共通結合機構(CBM)をつかって、HTVとISSはドッキングします。
[安全性]
ISSには宇宙飛行士が滞在しており、HTVの誤作動、故障によるISSへの衝突は許されません。
そのためHTVは構成部品自体の信頼性はもちろん、
さらにシステムに2重、3重の安全策がとられているそうです。
たとえば電力は2系統から供給されていて、一方が故障しても、
残った一方に切り替えられ、すべての供給をまかなえます。
またCPUもひとつが故障しても、他のCPUにタスクが振り分けられ作業を続行できます。
HTV(こうのとり) [HTV]

日本の無人宇宙船補給機で、国際宇宙ステーション(ISS)への補給を行っています。
H-II Transfer Vehicleの頭文字からHTV。”こうのとり”は愛称。
H-ⅡBというロケットで打ち上げられます。
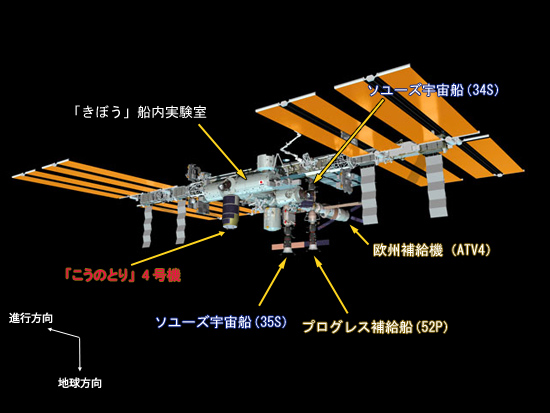
ISSは多くの国が協力する国際プロジェクトですが、
日本も主に”きぼう”という有人実験施設で参加しています。
この”きぼう”をはじめISSで使用される実験装置をHTVで運ぶそうです。
またISSには常時6名の宇宙飛行士が滞在しており、彼らの食糧や衣類の輸送も行っています。
[ランデブー]
打ち上げられたHTVは5日間かけてISSに自動で接近、10mの距離でランデブー。
宇宙飛行士が操作するISS側のロボットアームにより、”HTV”とISSはドッキングします。
[補給]
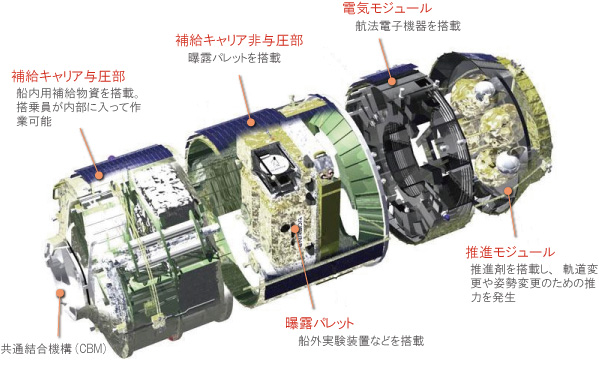
・補給キャリア与圧部
食料や船内用実験ラックなど、ISS船内で使用される物資が搭載されます。
共通結合機構(CBM)を通じて、ISSから宇宙飛行士が乗り込み、
物資をISS船内へ運び込むそうです。
・補給キャリア非与圧部
船外で使用される実験用具が、曝露パレットと呼ばれる台に乗せられています。
この曝露パレットがISS側のロボットアームで引き出され、”きぼう”側のロボットアームに渡されます。
”きぼう”側のロボットアームは、実験装置を船外実験プラットフォームに取り付けます。
空になった曝露パレットは再び”HTV”に戻されます。
[再突入・データ収集]
HTVはISSで出た廃棄物を積み込み、ISSから離脱します。
その後、大気圏へ再突入、燃え尽きます。
HTVには「i-Ball」と呼ばれる再突入データ収集装置が搭載されていて
この「i-Ball」だけは燃えずにパラシュートで減速・着水して、再突入データを送信します。
HTV(こうのとり)のデータ
| 全長 | 直径 | 質量 | 補給能力 | 軌道 | 打ち上げロケット |
|---|---|---|---|---|---|
| 9.8m | 4.4m | 10.5t | 6t | 高度350km~460km | H-ⅡB |
出展:
http://www.jaxa.jp/projects/rockets/htv/design_j.html



